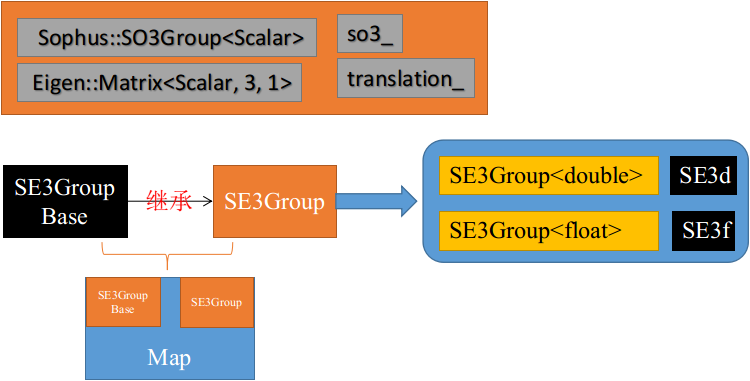
在看sophus的代码的时候除了弄懂那些traits技巧,在使用Sophus库的时候应该注意各类之间的继承以及相关的接口。如下图所示。SE3x(这里包括SE3d、SE3f)实例化于SE3Group。
变换
SE3可以是将点转换到其他坐标系,也可以是变换的组合。两种运算都用乘号重载。这一点决定了Sophus比较好用,我们在里程计中经常性转换点到不同的坐标系下,拼接变换计算实际位姿。
SE3类型给出了乘以点,也就是通用变换$\mathbf{R}\mathbf{p}+\mathbf{t}$,这种变换使用一个*重载了这个操作。
SE3类型的构造也比较简单,只需要找到对应的四元数可位移向量。
SE3GroupBase
输入
| – |
功能 |
函数 |
| 1 |
四元数 |
setQuaternion() |
| 2 |
旋转矩阵 |
setRotationMatrix() |
| 3 |
仿射矩阵 |
setAffine() |
矩阵操作
| – |
功能 |
函数 |
| 1 |
adjoint Transform |
Adj() |
| 2 |
inverse |
inverse() |
| 3 |
to lie algebra |
so3() |
| 4 |
log map |
log() |
| 5 |
exp map |
exp() |
| 6 |
归一化so3元素 |
normalize() |
| 7 |
hat |
hat() |
| 8 |
李括号 |
lieBranket() |
输出
| – |
功能 |
函数 |
| 1 |
仿射矩阵 |
affine3() |
| 2 |
对应4x4矩阵 |
matrix() |
| 3 |
对应3x4矩阵 |
matrix3x4() |
| 3 |
对应旋转 |
rotationMatrix() |
| 4 |
对应平移 |
translation() |
| 5 |
四元数 |
unit_quaternion() |
被重载操作
| – |
功能 |
符号 |
| 1 |
点坐标系变换 |
* |
| 2 |
赋值 |
= |
| 3 |
坐标系composition |
* |
SE3Group
该类继承自SE3GroupBase,该类的成员函数主要
- 构造函数,构造可以来自一个4x4矩阵,也可以来自四元数+位移,还可以是旋转矩阵+位移。
- 返回数据指针,scalar
- 返回so3、translation。